
Přehled
Mostový jeřáb, běžně známý jako „pohon“, je druh zvedacího stroje široce používaného v průmyslových a těžebních podnicích, jeho ovládací mechanismus se skládá ze tří v zásadě nezávislých hnacích systémů, systému řízení automobilů, systému pohonu háku, měniče K-DRIVE k výše tři řídicí systém úspěšně reformován, následující hlavně popisuje proces transformace systému řízení před a po chůzi.

Systém Výhody
- Pole orientované vektorové řízení s otevřenou smyčkou, plně oddělené proměnné motoru, velký nízkofrekvenční točivý moment, rychlá odezva atd.;
- KD600 přijímá režim vektorového řízení s otevřenou smyčkou bez PG a vektorizovaný režim V/F a zesiluje konfiguraci úrovně výkonu prvního převodového stupně;
- Frekvenční rozsah: 0,5-600Hz nastavení segmentu, plynulé plynulé nastavení;
- Rozsah pracovního napětí: 380V ± 20% a napětí sběrnice okamžitě klesne na 360VDC pro bezproblémový provoz;
- Přetížení: 150 % jmenovitého proudu, povolena 1 minuta; 200% jmenovitý proud, povolena 1s;
- Momentové charakteristiky: rozběhový moment, větší než 2 krát jmenovitý moment; Nízkofrekvenční krouticí moment větší než 1,6násobek jmenovitého krouticího momentu při 1Hz; Brzdný moment je větší než jmenovitý moment.
Provozní vlastnosti
- Zvedací mechanismus jeřábu má velký rozběhový moment, který obvykle přesahuje 150 % jmenovitého momentu. Pokud se vezme v úvahu přetížení a další faktory, musí být během procesu spouštění a zrychlování zajištěno alespoň 200 % jmenovitého točivého momentu;
- Když zvedací mechanismus běží dolů, motor bude ve stavu rekuperace energie a musí být brzděn spotřebou energie nebo rekuperační zpětnou vazbou do sítě;
- Zatížení zvedacího mechanismu se dramaticky změní, když zvednutý předmět opustí nebo se dotkne země, a frekvenční měnič musí být schopen plynule ovládat rázové zatížení;
- Vzhledem k tomu, že pojezdová rychlost předního a zadního pojezdového mechanismu jeřábu není při mechanickém provedení vysoká, převodník lze využít pro správné překročení rychlosti pro zlepšení pracovní efektivity.
Jednoduché schéma zapojení
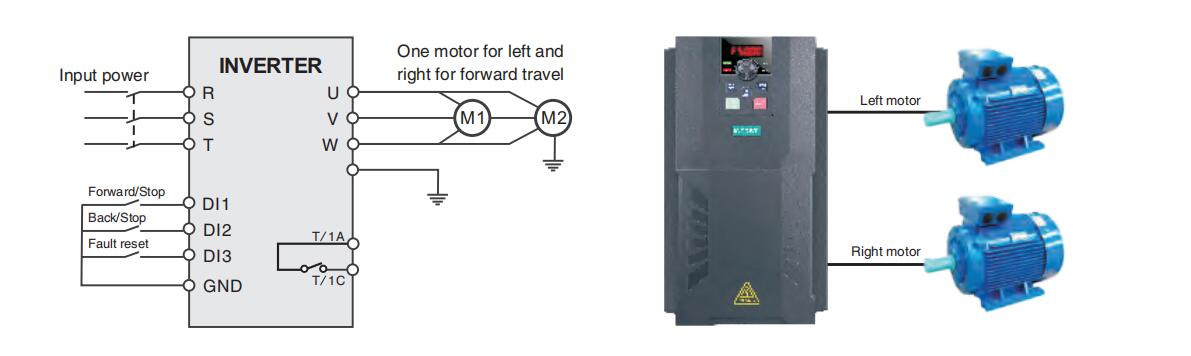
Nastavení parametrůng a popis(parametry jízdy levého a pravého motoru)
| Parametr | Vysvětlit | Nastavení parametrů | Vysvětlit |
| P0-00=0 | VF ovládání | P5-00=1 | vpřed |
| P0-04=1 | Externí terminál start stop | P5-01=2 | provést později |
| P0-06=1 | Digitální nastavení frekvence | P6-00=2 | Poruchový výstup relé 1 |
| P0-14=60,00 | Maximální frekvence | P4-01 = 1,6 kW | Napájení připojeného motoru |
| P0-16=60,00 | Horní mezní frekvence | P4-02=380V | Jmenovité napětí motoru |
| P0-11=60,00 | Digitální nastavení frekvence | P4-04=3,3A | Jmenovitý proud motoru |
| P0-23 = 3,0 s | Doba zrychlení | P4-05=50Hz | Jmenovitá frekvence motoru |
| P0-24 = 2,0 s | Doba zpomalení | P4-06=960 R/Min | Jmenovitá rychlost motoru |
| Poznámka: Pokud je použit jeden frekvenční měnič se dvěma motory, důrazně se doporučuje nainstalovat odpovídající tepelné relé na přední konec každého motoru, aby byl každý motor chráněn. | |||
Analýza účinku operace
Frekvenční měnič řady KD600 provedl transformaci frekvenční konverze na pohyblivém systému a efekt tr-transformace je relativně ideální, což je znázorněno především na:
- Je realizován pozvolný rozběh a pozvolné zastavení během spouštění, což snižuje dopad na elektrickou síť;
- Po použití frekvenčního měniče odpadá původní posuvný stykač a odpor pro regulaci rychlosti, což nejen šetří náklady na údržbu, ale také snižuje prostoje na údržbu, čímž se zvyšuje výkon;
- Když hlavní hák pracuje na 5Hz~30Hz, efekt úspory energie je velmi zřejmý;
- Frekvenční měnič se používá k ovládání předního a zadního pojezdu a série levého a pravého pojezdového mechanismu mohou realizovat nadfrekvenční práci. Za předpokladu zajištění bezpečnosti se výrazně zlepší efektivita práce a sníží se také pracnost údržby pojízdného zařízení v důsledku časté výměny střídavých stykačů.
Závěrečné poznámky
Frekvenční měnič se používá k ovládání přední a zadní chůze a řady levých a pravých chodících mechanismů, které mohou realizovat přetaktování, výrazně zlepšit efektivitu práce za předpokladu zajištění bezpečnosti a také snížit pracovní zátěž údržby hnacího zařízení v důsledku častá výměna AC stykačů.
Místo aplikace

Čas odeslání: 17. listopadu 2023